电机控制
PDF看这个:电机控制笔记PDF版本
直流电机的控制
晶闸管与双闭环调速
-
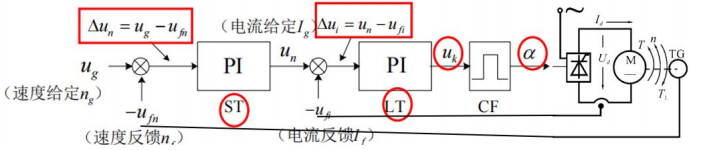
PI调节器的作用:
- 速度调节器 ST:
- 调速精度,做到静态无差;使机械特性硬,满足负载要求;
- 实现转速快速调节。
- 电流调节器 LT:
- 精确满足负载转矩大小要求;
- 调速的快速动态特性(转矩的快速响应)。
- 速度调节器 ST:
-
电流环在内的原因:
- 时间常数小,响应更快
- 引入电流环是为了控制电枢电流
- 电流仅与负载转矩有关
-
PI参数的影响:
-
Kp增大,提高系统动态性能;反之削弱
-
Ki增大,静态误差减少,但系统容易震荡;
Ki减小,积分太弱,稳态误差难以快速减小
-
Kd过大或过小,增加系统超调和调节时间
-
-
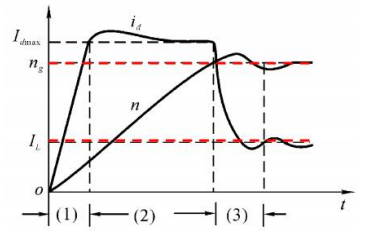
起动过程特征:
-
起动: 由 0 上升到 (限幅值);
ST、LT 全部饱和限幅,蜕化为限幅器,系统实为速度、电流双开环;
-
加速: 恒定(电流调节结果,非限幅);
ST 饱和限幅,LT 作 PI 调节,实为电流单闭环系统
-
PI 调节至稳态: 转速稳定至 ,电流稳定至 (对应 );
ST、LT 均作 PI 调节,真正速度、电流双闭环工作。
-
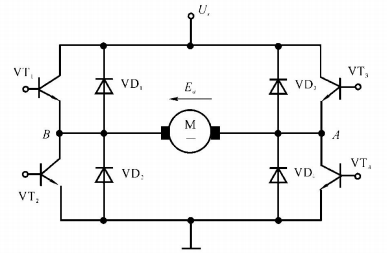
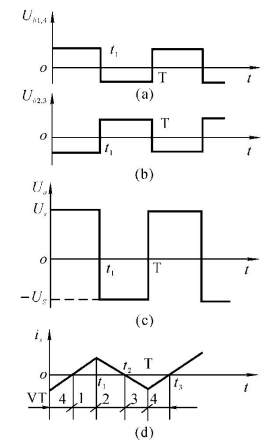
PWM调速
 |
 |
|---|
| 单极性 | 双极性 | |
|---|---|---|
| 工作 方式 |
1. VT3关断,VT4导通 2. VT1 和 VT2 轮流导通 3. 控制电压为负时,13对调,24对调 |
1. VT1 和 VT4 同极性 2. VT2 和 VT3 同极性 3. 两组极性(通断)互补 |
| 负载电压系数 | ||
| 工作 流程 |
1. VT1 通,电动运行 2. VD2 蓄流,电动运行 3. VT2 和 VD4 导通,能耗制动 4. VD1 和 VD4 蓄流,再生制动 |
1. VT1 和 VT4 导通,电动运行 2. VD2 和 VD3 蓄流,电动运行 3. VT3 和 VT2 导通,反接制动 4. VD4 和 VD1 蓄流,再生制动 |
异步电机的控制
调速主经常使用“转差功率不变型”调速方式,即保证 s ()不变。如异步电机的变频调速和变极调速均属于这类方式。
还有“转差功率消耗型”调速方式,通过消耗转差功率 来换取转速的下降,如调压调速,串电阻调速。
变转差调速
调压调速
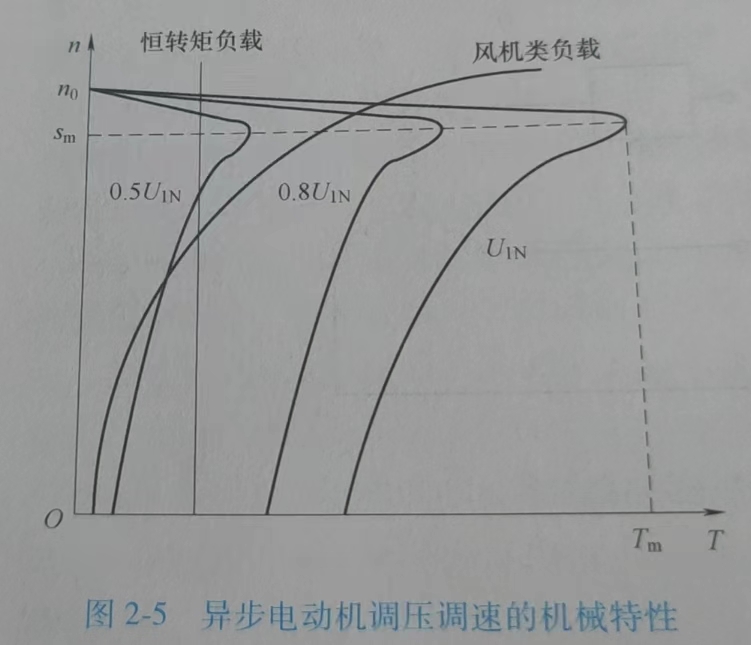
- 电机电磁转矩:
- 缺点:调速范围较小()。只能降压调速,且,属于弱磁调速。依靠增大转差频率 s 调速,转子回路消耗的滑差功率增大,机械输出功率减小。
串级调速
串级调速是指在转子中引入与转子同频()的转子电势,以吸收或补充滑差功率,从而进行调速。详见第三章。
变频调速
变频调速的理论基础
基本实现方法
| 基频下调 | 基频上调 | |
|---|---|---|
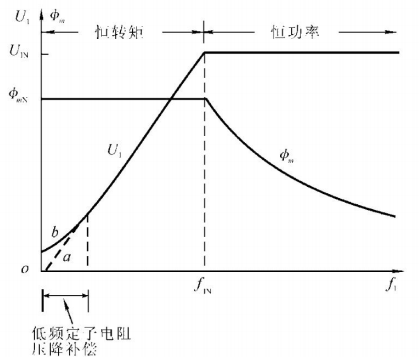
| 要求 | 保持气隙磁通 恒定→磁路工作点不变 变频中维持 为定值 适合恒转矩负载 |
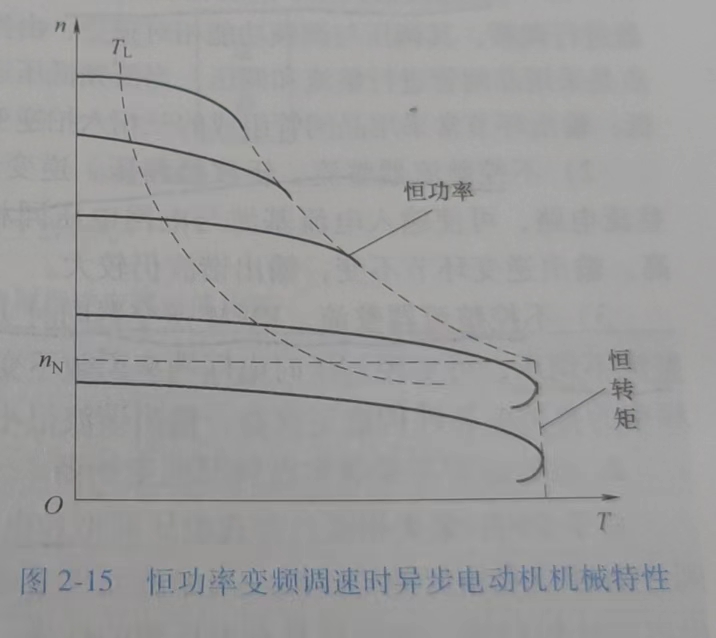
定子电压 属于弱磁调速,适合恒功率负载 |
| 机械特性 | 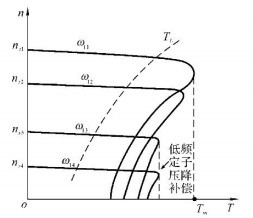 |
 |
| 不变,s-T向下平移 考虑阻感压降, 下降 |
变大,机械特性变软 气隙磁通↓ → 电磁转矩↓ |
基频以下电压补偿控制
| 恒气隙电势频比 | 恒电压频比 | 恒转子磁通(转子电势) | |
|---|---|---|---|
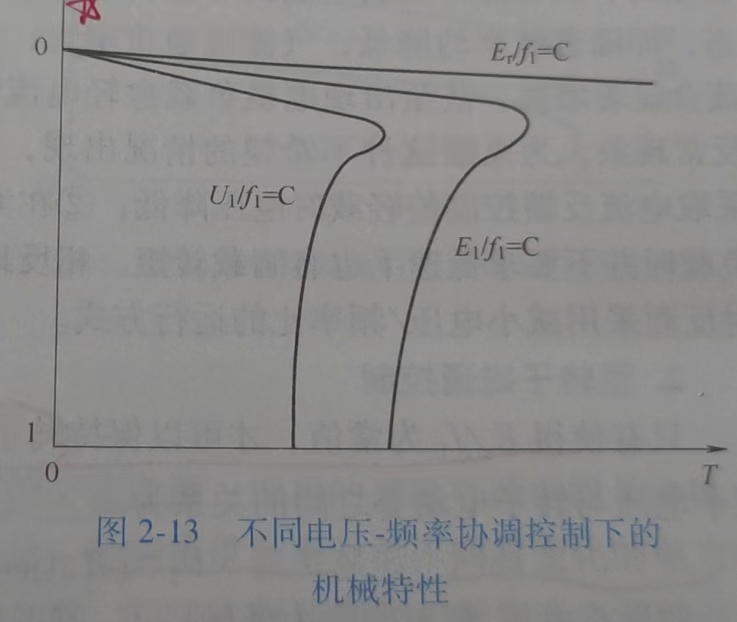
| 特点 | 气隙磁通 恒定 需要补偿定子阻抗上的压降 n-T 曲线纯向下平移 低频下 大, 小 临界转差、转矩更硬,机械特性好 |
类似前一个,但控制更方便 最大转矩 随频率降低而减小 |
机械特性 n-T 为直线 不同同步速下,为一簇平行线 工作特性好,由高性能电机实现 |
非正弦供电的影响
-
磁路工作点改变
高次谐波使气隙磁密幅值增加(),功率因数 下降,磁路计算和空载试验等需要提高设计电压
-
定子漏抗减小
谐波电流使槽电流增大,槽磁漏增加,饱和程度提高 → 定子漏抗 减小
-
转子集肤效应
高次谐波转差率 ,频率较高,集肤效应强 → 转子电阻增大,转子槽漏抗减小(等效磁链减小) → 增加转子谐波损耗
-
功率因数下降
电流有效值增大,气隙磁密增大 → 磁路饱和程度提高,无功励磁电流增加 → 功率因数明显下降
-
损耗与效率
异步电动机损耗增大,效率下降。主要影响来自于转子谐波损耗,与负载关系不大。
-
谐波转矩的影响
- **恒定谐波转矩:**谐波磁场转差率 ,内功率因数角 较小,基本都是无功电流 → 同次电流产生较小的异步转矩(可忽略)
- **脉动谐波转矩:**不同次数的谐波磁场与基波磁场相互作用,产生高频交变的脉动转矩,平均值为0但幅值较大(如5次负序电流和7次正序电流都会产生6倍基频的脉动转矩)
-
电应力
高瞬间电压变化梯度 → 浪涌电压尖峰 → 各线圈间电压按分布电容分配 → 约40%电压加在第一个线圈上,易绝缘老化
-
轴电流
零序电压 ,产生流过轴承的电流(高频 → 阻抗小 → 电流大)
可以采用增大气隙、绝缘轴承(即增大阻抗)、经隔离变压器接地等方式消除
- 电压源型非正弦电源输出,选漏抗大的电机(限制谐波电流)
- 电流源型非正弦电源输出,选漏抗小的电机(限制谐波电压)
静止变频器
可以看看这个:电力电子技术 | Paradox’s Website (zju-paradox.top)
变频调速实现方法
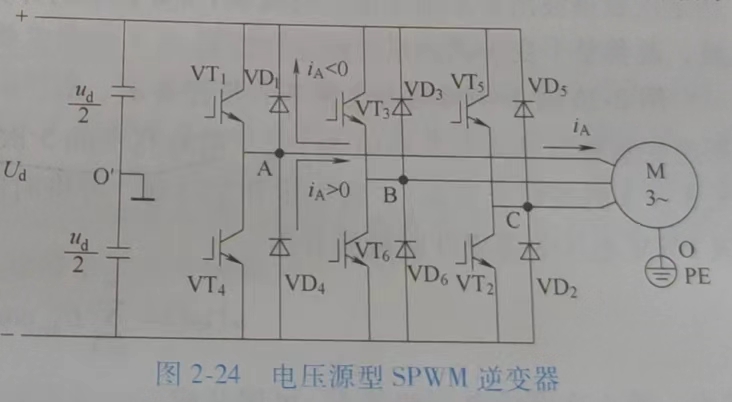
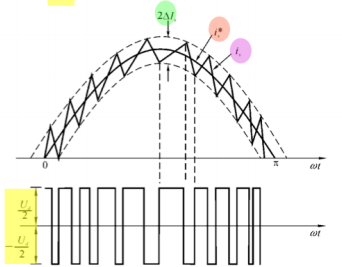
正弦脉宽调制 SPWM
| 单极性控制 | 双极性控制 | 载波比N |
|---|---|---|
 |
 |
 |
- 具体实现方法:
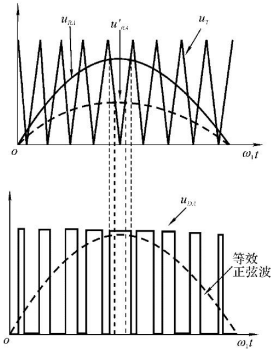
- 自然采样法:通过一组三相对称的正弦参考信号(调制波)与等腰三角电压信号(载波)进行比较,由交点处控制通断
- 制定谐波消去法:解方程
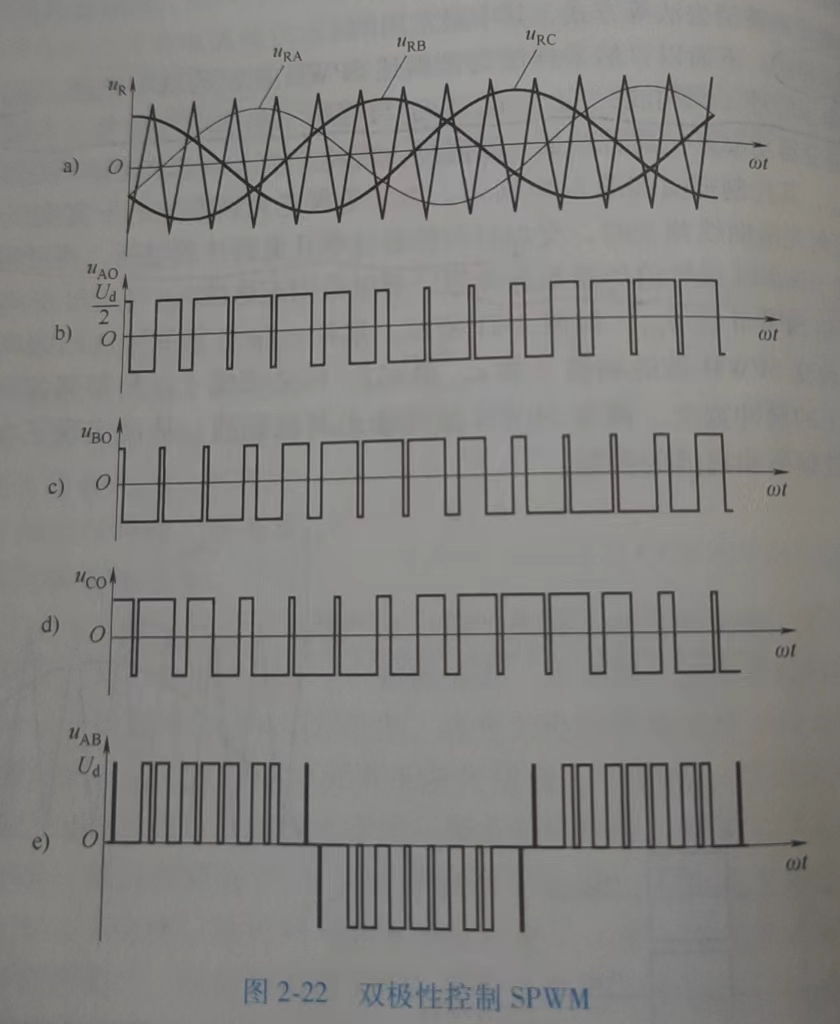
- 双极性控制:
- PWM 是 ,得到输出电压
- 线电压 ,由 三种电压选择
- 电压控制:
- 三角波频率(载波频率)→ 开关频率,越高性能越好
- 正弦波频率、幅值 → 输出正弦波频率、幅值
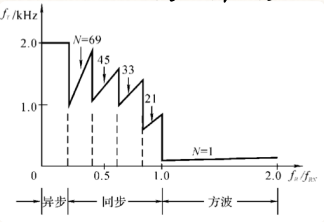
- 载波比 :
- 最好选择 N 为 3 的倍数,这样能保证输出波形正负半波对称,且三相波形互差120°对称
- 开关死区的影响:
- 由于开关死区,会存在上下两管均关断的情况,因此输出电压幅值下降。平均偏差电压
- 变频器输出频率越低,死区影响越严重。
- 功率因数越大,电压电流同向越久,死区影响越严重。
电流跟踪控制
实际上就是一个很简单的滞环控制,以输出接近正弦的定子三相电流为目的。优点是简单,缺点是难以进行频域分析(PWM无规律,不确定)
磁链跟踪控制 SVPWM
基本理论
最终目的是产生圆形的旋转磁场,从而产生恒定的电磁转矩。磁链的改变依靠电压空间矢量作用获得,因此称为电压空间矢量调整 SVPWM。
可以参考电机建模里的这个:电机系统建模与分析 | Paradox’s Website (zju-paradox.top),但是电机建模里面是恒幅值变换,这里是恒功率变换,需要把系数 换成 。
电压和磁链的关系式由 导出,忽略定子电阻的压降,则有:
如果电压通过电压源型逆变器供电,那么每相定子电压有 两种状态,分别用 表示。那么三相定子电压就可以用一组向量 表示,一共 种可能。其中 ,所表现出的定子电压综合矢量都是 ,剩下6种在空间内均匀分布(间隔60°)。
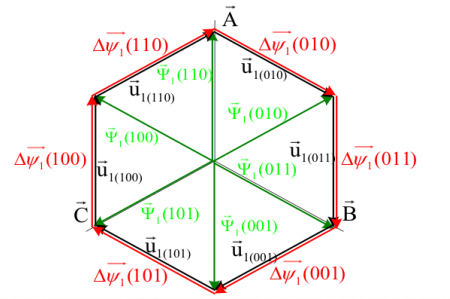
正六边形旋转磁场
如上图所示,令6个有效电压矢量在一个周期内按顺序工作 电角度,即 。这样的话磁链就会沿着上图那样的六边形进行旋转,磁链幅值为:
如“变频调速理论基础”中所说,基频下调时需要维持气隙磁通恒定,但是随着频率 的减小,定子磁链会上升,这时候就要插入零电压矢量 或 。有效电压矢量只工作 的时间,剩下的时间 用零电压矢量来补。具体用 还是 考虑当前电压矢量变到哪个比较方便。
基频以上本来就是弱磁控制,根据公式磁链减小,因此没关系。
期望电压空间矢量的合成
通过对空间矢量的细分与组合,可以实现更接近圆形的正多边形。先读取当前定子磁链 ,判断所需的定子电压矢量 。然后根据该电压矢量所处的位置,用临近的两个有效电压矢量和零电压矢量(若需)进行合成如下:

其中 是开关周期,个人感觉应该是“想细分的正多边形边数”
变频调速系统
开环调速系统
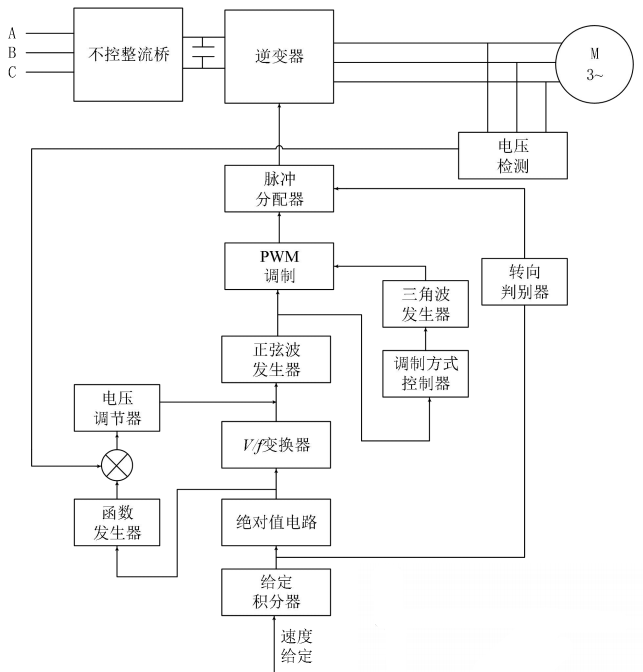
-
输入的速度给定通过变换得到所需的电机运行频率,以电压 V 的形式呈现:
- 一方面,频率给定经 V/f 变换器(从 V 到 f )产生了决定正弦调制波频率的脉冲,来控制正弦调制波 的频率
- 另一方面,频率给定经函数发生器实现了对正弦调制波幅值的控制,即基频以下电压降低,保证气隙磁通恒定,最大转矩恒定;基频以上电压恒定,功率恒定
-
至此,正弦波发生器产生频率和幅值都与速度指令相适应的正弦调制波
- 一方面,调制波通过调制方式控制器决定三角波载波的频率
- 另一方面,正弦调制波与三角波载波作用,产生用于控制逆变器的 PWM
-
特点:
- 无频率反馈,有电压反馈
- 频率给定后不变,电机转速会随着负载增大而变小。适合长期稳态运行,调速精度不高的场合
闭环调速系统
控制原理
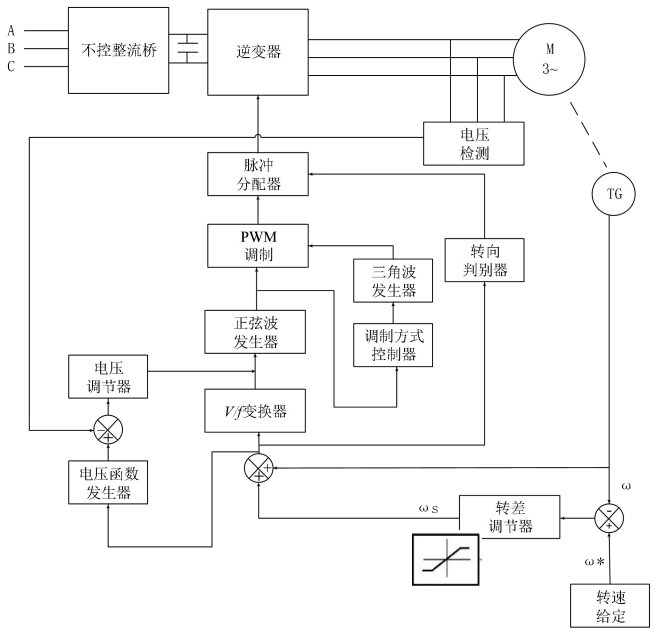
-
控制原理与方法:
-
也就是说在气隙磁通不变的情况下,电磁转矩与转差频率成正比。除了上文函数发生器之外,可以参考书本 p64 的方法来实现更加精确的气隙磁通恒定。
-
开环调速系统可以实现同步速 的控制,因此闭环的关键就是实现对转速和同步速的闭环:
-
-
控制框图的另一种画法:

控制过程
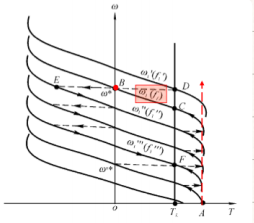
- 起动时 , 很大,因此输出 ,转速沿着最大转矩的铅垂线直线上升
- 直到 接近 ,电磁转矩逐渐减小,逐渐稳定到机械特性与负载转矩的交点
- 当给定转速突然减小,电机工作点将从D点移到E点,电磁转矩 ,在接近给定转速时再沿着机械特性(?)下降
高性能控制
矢量控制
异步电机数学模型
坐标变换仍然可以参考电机建模:电机系统建模与分析 | Paradox’s Website (zju-paradox.top),但是电机建模里面是恒幅值变换(前面有一章是恒功率变化,那里需要把系数 换成 )。关于 到 的坐标变换方式在文章里已经写的很明白了,这里不再赘述。
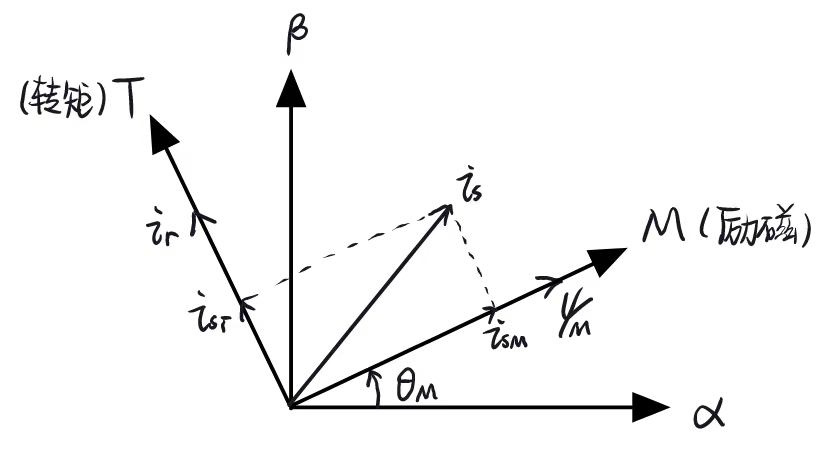
- M轴(d)为转子磁链矢量(转子磁场)的方向,T轴(q)与之垂直。
- 为将异步电机等效为直流电机,必须采用**恒转子电动势频比()**控制
- 仍然满足:
- 旋转电势、转矩、转子电流落在交轴上:(稳态运行时)
- 励磁磁链落在直轴上:
异步电机物理模型
-
异步电机电感矩阵为 ,其中:
- 各相自感: 或
- 同相间互感(如Aa):
- 异相间互感(如AB):
-
定子磁链:
-
转子磁链:
- 定转子磁链都可以往两个轴(M、T)上分解,只需要给电流对应加下标就行。
-
电压方程:
-
电磁转矩:
当转子磁链的幅值 保持不变的时候,通过调节定子电流的转矩分量 即可控制电磁转矩。
-
定子电流:
-
转子磁链:
- 定子电流的直轴(M轴)分量控制转子磁链,定子电流的交轴(T轴)分量控制电磁转矩,实现解耦
-
转差频率:
转子磁场定向技术
| 磁通检测—电压模型 | 磁通检测—电流模型 | 转差频率控制式 | |
|---|---|---|---|
| 输入 | 定子电压 、定子电流 | 定子电流 、电机转速 | |
| 过程 | |||
| 输出 |
控制系统实例
- Te是带 1.5 这个系数的,下面写错了,他书里也有点问题
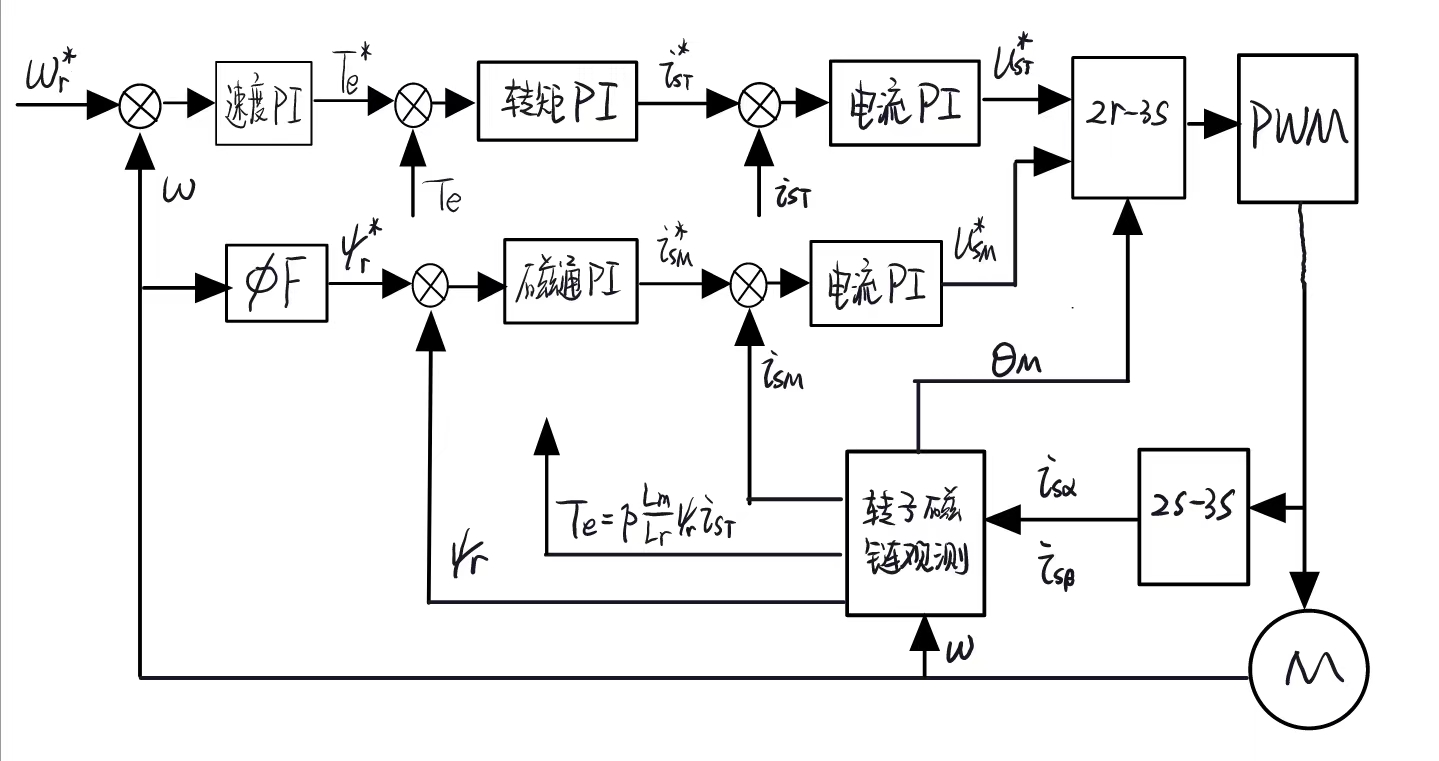
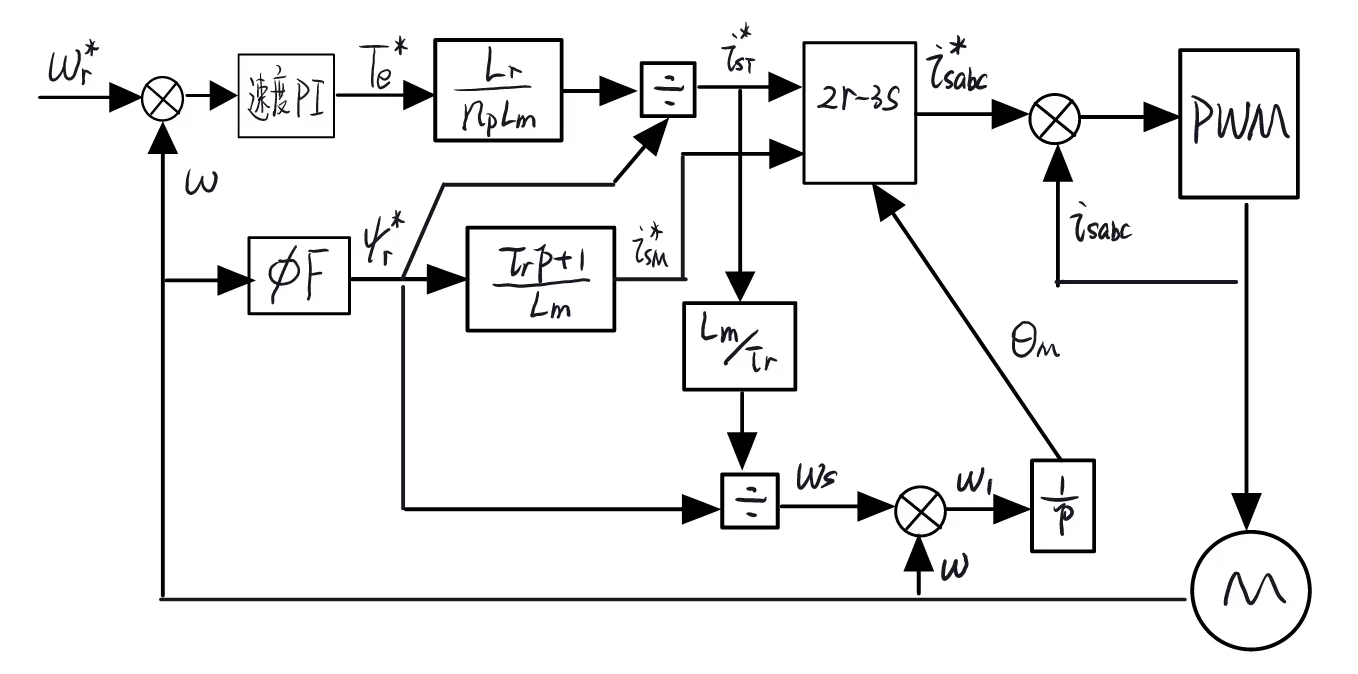
以下是控制框图的注意事项:
-
控制框图可以拆分为:物理模型前向通道 + 反馈回路(转子磁场观测)+ 输出
-
物理模型所述的前向通道:
如上文所述,定子电流的直轴(M轴)分量控制转子磁链,定子电流的交轴(T轴)分量控制电磁转矩
这个是电机自带的传递函数,控制框图相当于是逆过程,所以:
- 通过电磁转矩 得到定子电流交轴分量
- 通过转子磁链 得到定子电流直轴分量
至于如何得到,方式可以有很多,比如:
- 通过PI控制器等 ST 进行输出,需要引入观测量如 等,如图1
- 通过物理模型直接计算,如图2
-
反馈回路(转子磁场观测):
观测模型主要注意两点:
- 前向通道中是否需要转子磁通 ,若要,则用磁通检测式,如图1;若不要,可用转差频率定向,如图2
- 这种观测模型的输入是什么?定子电流、转子磁链?
-
输出:
输出决定了电源的特性,与控制回路关系不大。前向通道所得到的一定是定子电流的M和T轴分量的给定值 ,可以采取如下措施:
- 直接做电流环控制,得到所需的定子电压给定值
- 对电流直接进行变换,利用变频控制中说的电流跟踪滞环控制进行控制
-
不需要记具体公式(应该吧),可以用常数、简写等代替。
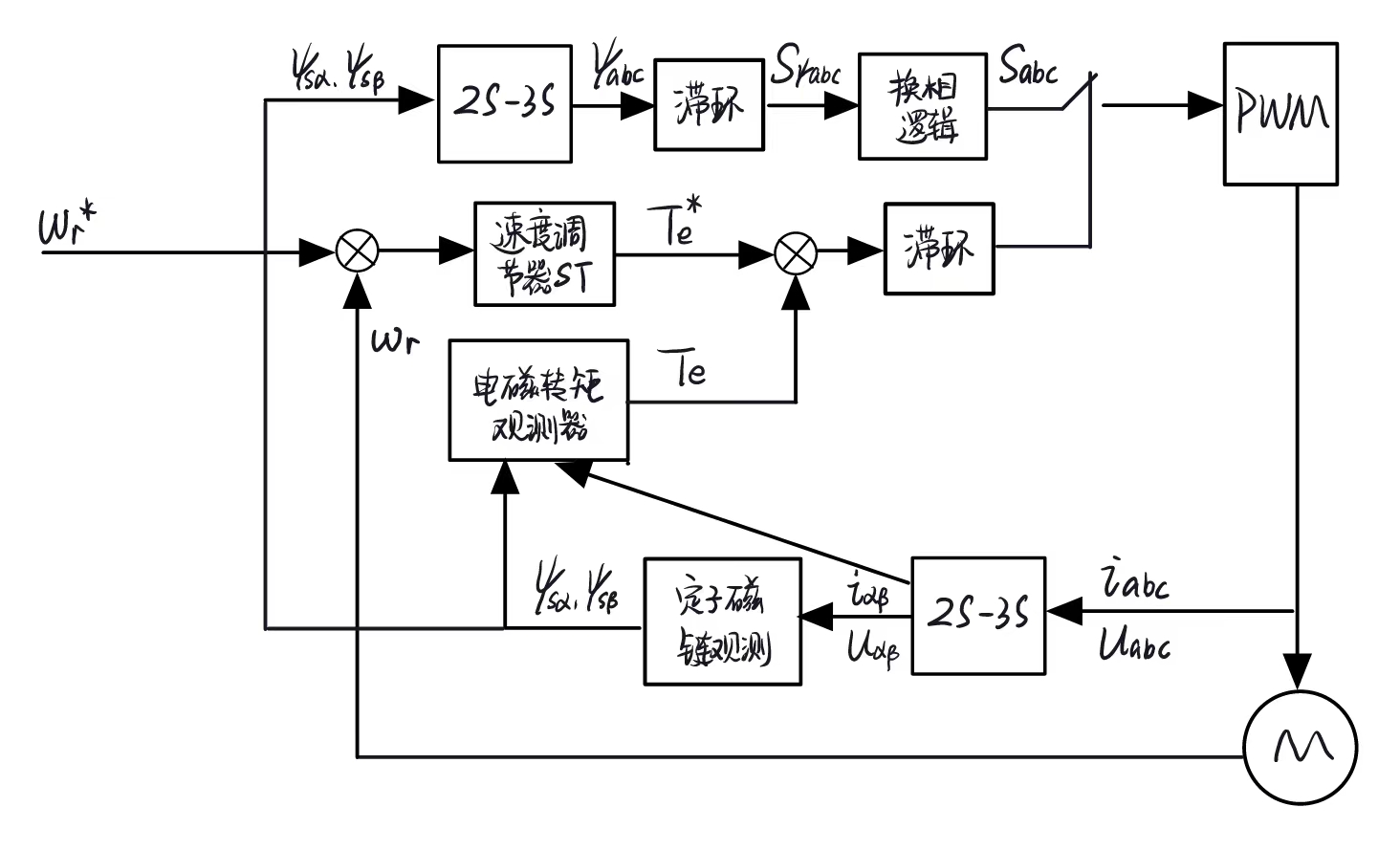
直接转矩控制
- 直接转矩控制将电机和逆变器作为一个整体来考虑,采用电压空间矢量对定子三相电压作综合描述,在定子坐标系中直接控制定子磁链 和电磁转矩 。
数学模型
- 近似认为 在匀速旋转(速度为同步速,但是这种直接对磁链进行的控制是可以人为控制频率 的),利用 来控制定子磁链,进而调节 ,从而调节电磁转矩。
磁链与转矩观测器
| 电压模型定子磁链观测 | 电流模型定子磁链观测 | 转矩观测 | |
|---|---|---|---|
| 输入 | |||
| 输出 | 即 $ \psi_s,\theta_{\psi s}$ | 即 $\psi_s,\theta_{\psi s} $ |
六边形磁链轨迹控制系统
-
他预先设立了一个换向逻辑,即:
- 采用六边形磁链轨迹控制的时候,某相(abc)磁链的轨迹是一个梯形波
- 通过滞环控制,将这个梯形波等效成方波(即1和0),方波周期为磁链轨迹周期
- 根据磁链和电压图,六种磁链向量(如 )会分别对应六种电压向量(如 )
- 把第三步的这个对应关系做成一个换向逻辑,控制三相电压开关
- 这个只能控制相位,磁链幅值需要通过电磁转矩滞环控制,来作为上面电压开关的总开关
-
所以他的控制系统长这样:
变压变频控制 VVVF
- 变频调速控制主要通过零电压矢量时间 和控制有效电压矢量时间 来实现
- 基频以下,恒磁通控制:频率 降低,周期 上升; 不变令 增大,使电压、磁通不变
- 基频以上,弱磁控制:频率 提高,周期 减小;令 减小满足频率变化,相应的电压、磁通要减少
- 在基频时,。
绕线式异步电机控制
- 这里主要讲的是变转差调速,即通过调节转差功率 来调节转差频率,进而调节转速。
- 但是如果在转子上接入电动势,那么转差功率将会被附加电动势吸收转化,回馈电网
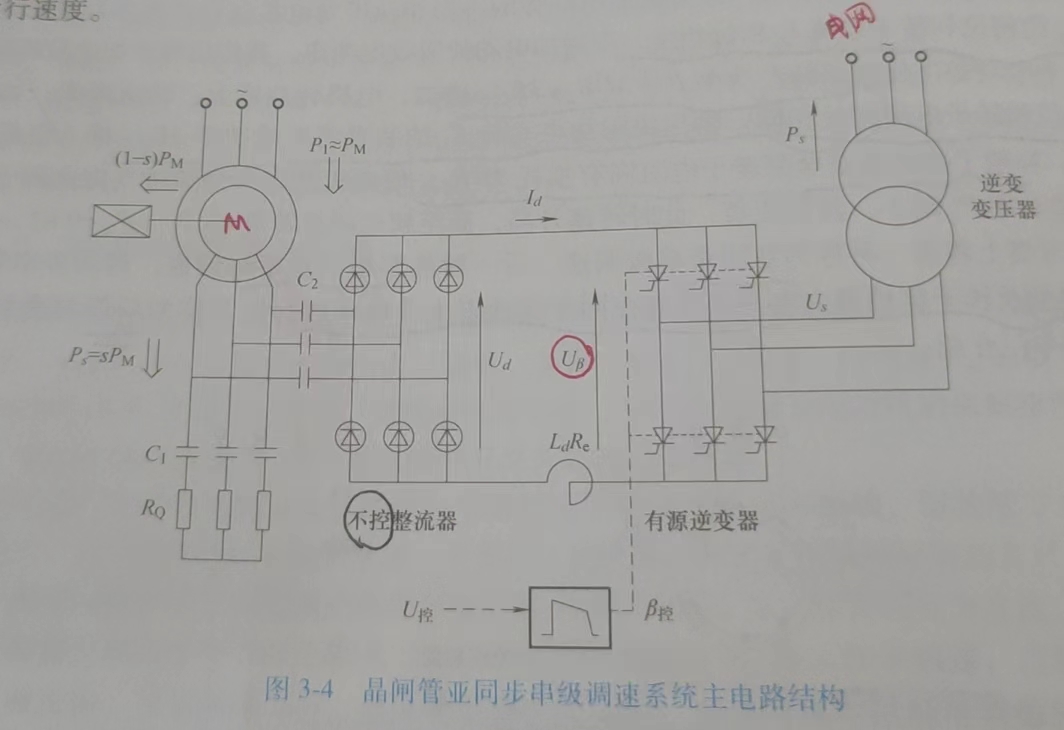
串级调速
- 在转子回路中传入一个与转子同频率 的附加电动势 ,取代转子电阻 。
| 假设 | 转速 | 能量 | |||
|---|---|---|---|---|---|
| 亚同步 | 与反相位 | ↑ | 下降↓ | 从电机流向电网 | |
| 超同步 | 与同相位 | ↑ | 上升↑ | 从电网流向电机 |
亚同步
- 机械特性与电压关系式
-
结论:通过改变逆变角 进行调速,但是转速会随着负载电流的上升而下降,特性较软
-
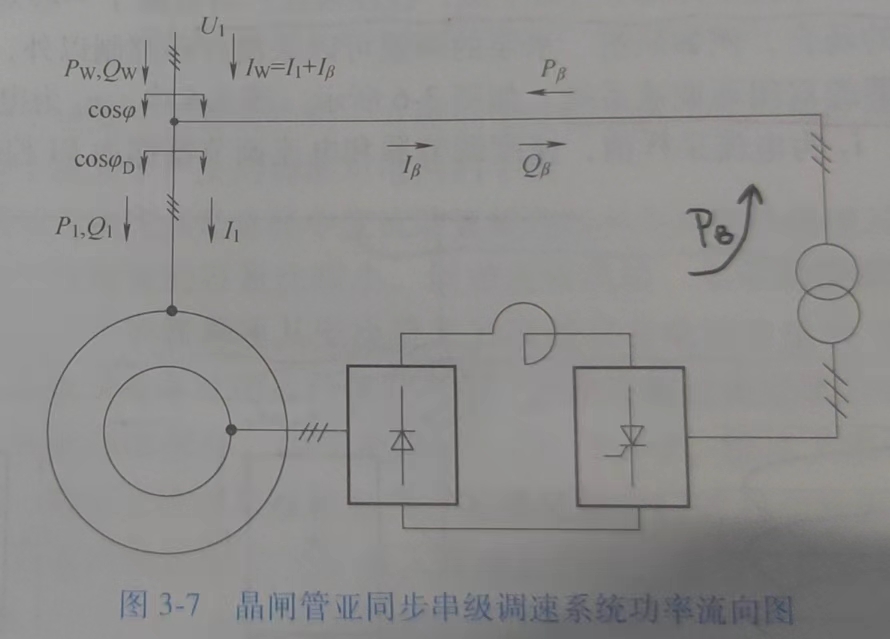
功率因数问题
-
逆变器晶闸管换向需要落后的无功,异步电动机也要落后无功,因此功率因数会比较低
-
可以看到下面这幅图(亚同步)里面一部分功率 经过晶闸管之后逆变回到电网,与上面这个表格是符合的
-
说过附加电动势 的频率是转子同频,所以频率很低,这个时候不控整流期间就会有严重的换向重叠现象,因此功率因数进一步减小
-
-
-
超同步 - 双馈调速与四象限运行
-
亚同步里面转子侧用的不控整流,在双馈调速系统(超同步)里面用的可控整流,这样能量才能从电网流向电机(即从右往左流动)
-
值得注意的是两个整流桥是反向连接,并且工作状态是互补的(即一个整流另一个逆变)
-
通过对整流桥电压正负与工作状态的调节,可以实现四象限运行,这四种状态由 2种电压(正负)× 2组状态(整流逆变/逆变整流)构成。可以实现 2种转速(亚/超同步)× 2种能量流动(电动/发电) 这四种状态。
-
双馈调速系统主要通过对整流桥从不控变成可控的改进,能减小装置容量一半,提高功率因数,实现四象限运行。
同步电机控制
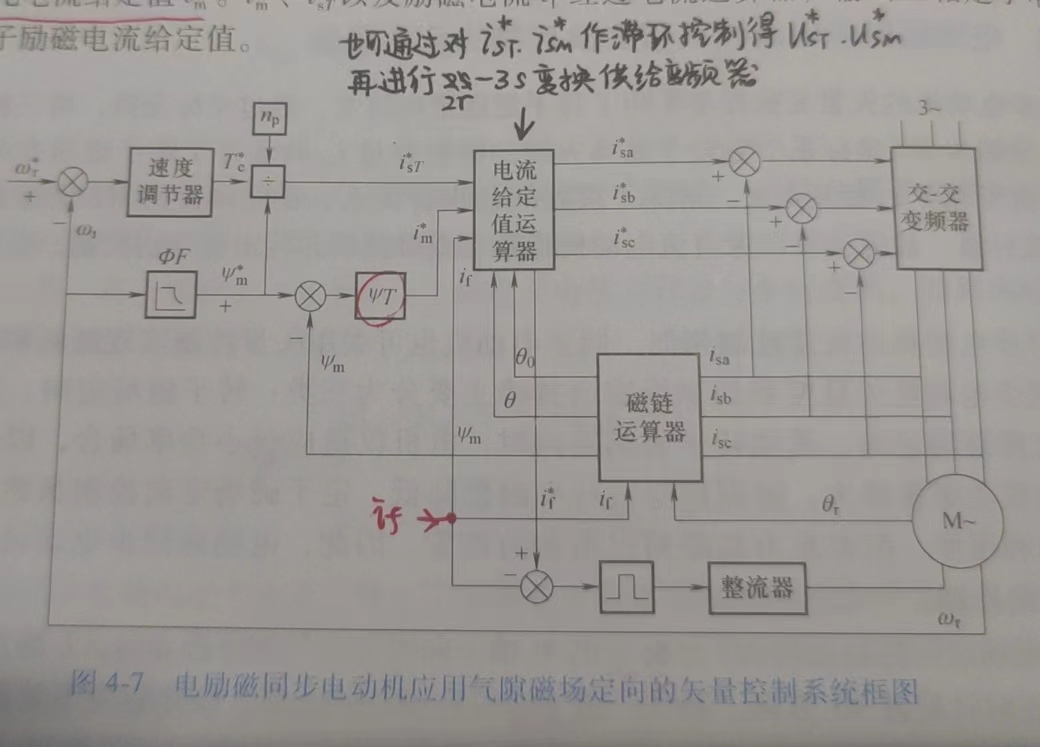
电励磁
方程式
-
同步电机的方程看这里:电机学笔记(总) | Paradox’s Website (zju-paradox.top),前面那个叫励磁转矩,后面那个叫同步磁阻转矩。把其他公式带进来,得到电磁转矩如下(前面是电励磁,后面是永磁):
-
-
通过励磁磁化电流 使气隙磁链 保持不变,这样通过调节定子电流的转矩 T 分量 来控制电磁转矩
观测器
| 磁链 | 电流给定值 | |
|---|---|---|
| 输入 | ||
| 输出 | ||
| 备注 | 需要来进行3s-2r | 和控制,因此需要控制 |
| 比正常系统多一个 的输入 |
- 这个空间矢量图比较复杂,需要解释一下:
- 这里有两个运动两相坐标系,一个是直轴-交轴坐标系 ,一个是磁链-转矩坐标系
- 有两个电流,定子电流 可以在 M-T 分解为 ,转子电流就是励磁电流 ,因为是直轴励磁,因此 落在 d 轴上
- 角度也有两个,其中 d 轴与 a 相的夹角为 ,M 轴与 a 相的夹角为 ,这两个轴之间的夹角为 ,其中 M 轴要超前 d 轴一点。有:
- 磁化电流 并不是实际存在的电流,仅是定转子电流在 M 轴(转子磁链轴)上的投影,即:
- 电机是可以直接输出的, 或者 也是可以有外部可以测量直接输入的
永磁电机
- 贴片永磁的特点是直轴和交轴电感一样,即 ,所以电磁转矩为
- 还有其他永磁电机,
- 没有转子电流,但是直轴会多一个磁链
| 基于 的控制 | 最大转矩电流比 MTPA 控制 | |
|---|---|---|
| (*是标幺值) | ||
| 图解 | 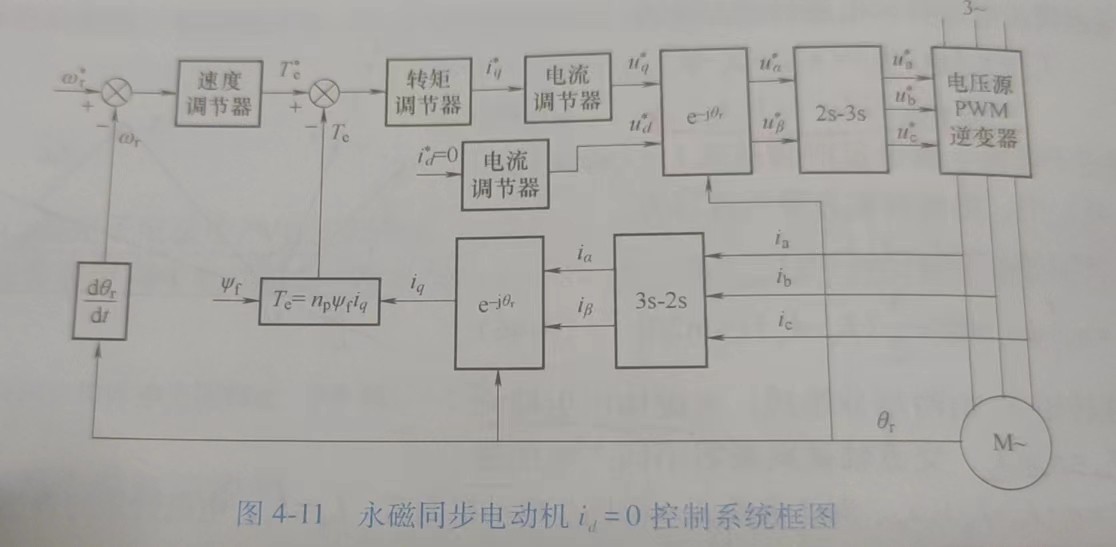 |
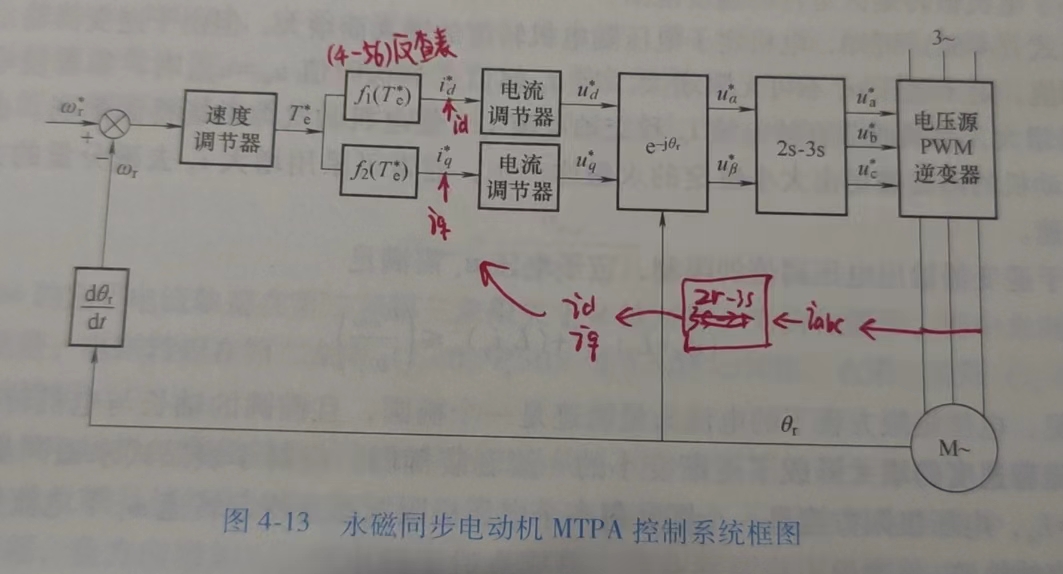 |
| 注释 | 控制极其简单!因为励磁 固定,所以只用控制交轴电流 $i_q $ 即可完成转矩控制。为了定子电流最小,可以直接让 | 控制也很简单,主要思想是在给定转矩下得到最小可用的定子电流 |
P.S
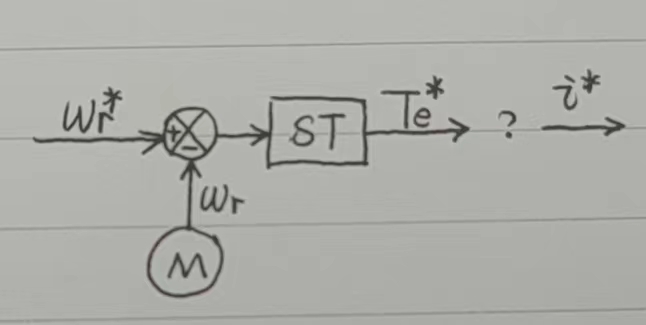
- 所有电机的输入都长这个样子(或者再多加一点):
- 最终得到的控制量一定是两相电流参考值,要么是 ,要么是
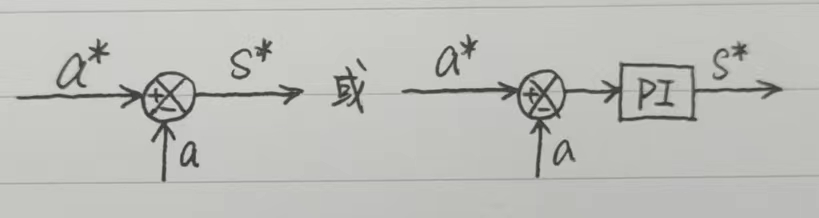
- 我们经常见到下面这幅图的小模块,他的意思是:输出 s 能控制输入 a,比如转矩控制转速,电流控制转矩,电流控制磁链,电压控制电流